2. Flux Correction Design
2.1. Requirements
Flux correction involves updating field values along faces between neighboring blocks to ensure that conserved quantities are conserved across jumps in spacial and temporal resolution. The update involves adding correction factors to all coarse values that lie along coarse-fine interfaces, where the correction factors are computed using the coarse and fine fluxes across the interface. While the basic update is straightforward, care must be taken to ensure that the correction factors are computed correctly, especially for non-centered field variables or when adaptive time stepping is used. Additional corrections will be required for MHD, and expansion terms in cosmological problems may also need to be considered.
Basic operations involved include the following:
allocating and deallocating flux data
setting and accessing flux values
communicating fluxes between neighboring blocks (fine-to-coarse)
computing correction factors given coarse and fine fluxes
correcting coarse-level field values given correction factors
Relative to ENZO’s structured AMR grids, flux correction for Enzo-E / Cello is simpler due to Cello’s array-of-octree refinement: blocks only share fluxes at block faces (Enzo-E blocks do not contain sub-blocks), and the topology of fine- and coarse-level block intersections is simpler (Enzo-E coarse-level block faces are adjacent to exactly four fine-level block faces). The first simplification removes the need to loop over sub-grids or store fluxes internal to a block (i.e. the “projection step” in ENZO), and the second removes the need to explicitly store loop indices for flux arrays.
We assume fluxes for all conserved fields are provided by the hydrodynamics solver along all required block faces at each time step.
2.1.1. Method requirements
The Method component is responsible for storing, accessing, communicating, and operating with fluxes, to implement flux correction using support provided by Cello flux classes. Specific requirements are listed below:
RE-1. Initialize and store fluxes, provided by the hydro solver, at each time step for all conserved fields across all coarse-fine interfaces
RE-2. Request required fluxes from neighboring Blocks
RE-3. Compute correction factors for all required conserved field face values given a block face and fluxes from both the block and its face-sharing neighbor
RE-4. Correct conserved field face values given computed correction factors
RE-5. Identify which fields require flux correction
RE-6. Support adaptive time stepping
RE-7. Support MHD
RE-8. Ensure conservation is not lost through any other operation, e.g. interpolation
2.1.2. Data requirements
Cello’s flux data classes provide the flux-correction method with sufficient support for storing fluxes, computing flux correction factors, and applying the flux correction to conserved field values.
Specific requirements include the following:
RC-1. Store fluxes of conserved fields that lie along block faces
RC-2. Store associated fluxes computed on adjacent blocks
RC-3. Communicate fluxes between adjacent blocks when (and ideally only when) needed
RC-4. Store the time interval along with each collection of fluxes
RC-5. Allow multiple fluxes to be stored for the same field but different time steps
RC-6. Provide support for a block to compute correction factors along a block face given the block’s fluxes and the corresponding neighboring block fluxes
RC-7. Provide support for correcting field values along a block face given the computed correction factors
RC-8. Allow for dynamic allocation and deallocation of fluxes (optional)
RC-9. Ensure conservative inter-grid interpolation and coarsening
2.2. Design
Our design is developed top-down, starting with a Cello Method for implementing flux correction, MethodFluxCorrect.
To support coding MethodFluxCorrect, our design uses a FluxData class, whose responsibility is to manage all flux data on a block. This FluxData class is analagous to the existing FieldData and ParticleData classes. Like FieldData and ParticleData objects, FluxData is contained in the Blocks Data object. Communication is handled by the refresh mechanism by augmenting the existing communication of field and particle data between Blocks to include communicating fluxes.
While flux data could be implemented directly as arrays (e.g. std::vector, EnzoArray, etc.) other attributes need to be associated with each collection of flux data, specifically the Block the fluxes were computed on, which Block face the fluxes are associated with, the time interval for the fluxes, etc. For this we introduce a lower-level class FaceFluxes to store the array of flux data for an individual face, along with its defining attributes. The FaceFluxes class is in turn implemented usingt a simple Face class that defines the block face on which the fluxes are defined.
2.2.1. Interfaces
We develop the interfaces for the flux-related classes below, starting with the top-level MethodFluxCorrect, then the progressively higher-level Face, FaceFluxes, and FluxData classes.
2.2.1.1. MethodFluxCorrect class
The MethodFluxCorrect class is a Cello Method, whose main virtual method is compute(Block). This operates on some subset of data types on a Block. The MethodFluxCorrect method initiates communication between processes, and computes and applies appropriate flux-correction operations on required Field values along block interfaces.
Since the MethodFluxCorrect class is inherited from the Cello Method class, the public interface for this class is already prescribed. The two methods in the interface are the constructor MethodFluxCorrect() used to initialize the required communication, and MethodFluxCorrect::compute(Block) which implements flux correction on a given Block. (The other virtual function in the Method interface is timestep(), which is not required for flux-correction.)
MethodFluxCorrect::MethodFluxCorrect()Create a new MethodFluxCorrect object, and define its refresh communication requirements
virtual void MethodFluxCorrect::compute (Block * block)Request Cello to refresh its flux data, then apply flux correction
block: Block that flux correction is being applied to
2.2.1.2. Face class
A block Face is any facet, edge, or corner of a block. For flux correction in hydrodynamics, one typically only deals with facets, or (d-1)-dimensional faces; however, for MHD, edge faces may be used as well.
A face is determined by its “center” (ix,iy,iz), -1 <= ix,iy,iz <= +1, assuming the block corners are at (+/-1,+/-1,+/-1). As examples, the positive Y-axis facet is (0,+1,0), the edge along X=+1 and Z=-1 is (+1,0,-1), and the entire block as a 3-D “face” is (0,0,0).
Each Face is associated with a normal vector defining the direction of the fluxes. This direction is given by the axis (x=0, y=1, z=2), and face (lower=0, upper=1).
Face::Face (int ix, int iy, int iz, int axis, int face)Create a Face object for a Block associated with face (ix,iy,iz), -1 <= ix,iy,iz <= +1, with fluxes in the direction (axis, face), 0 <= axis < rank, 0 <= face <= 1.
void Face::get_face (int *ix, int *iy, int *iz)Return the tuple (ix,iy,iz), -1 <= ix,iy,iz <= 1, identifying the block’s face, which may be a corner, edge, facet, or the entire block.
int Face::axis()Return the axis associated with the normal direction: x=0, y=1, or z=2.
int Face::face()Return whether the normal direction is towards the lower (0) or upper (1) face direction.
2.2.1.3. FaceFluxes class
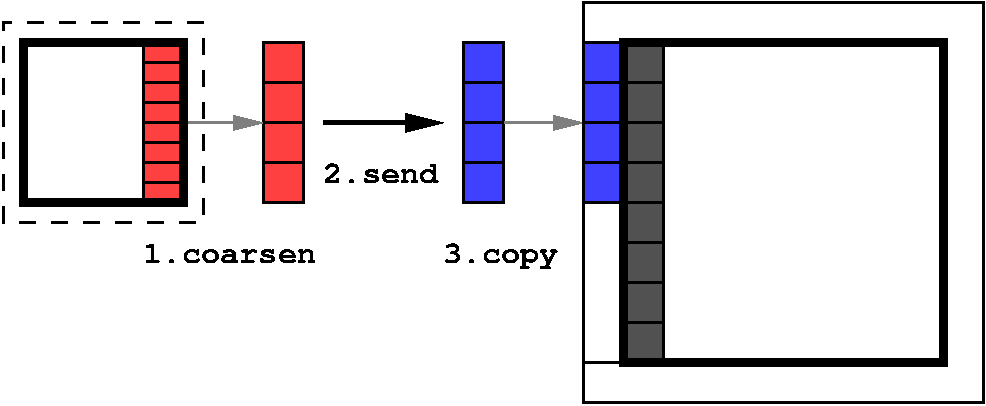
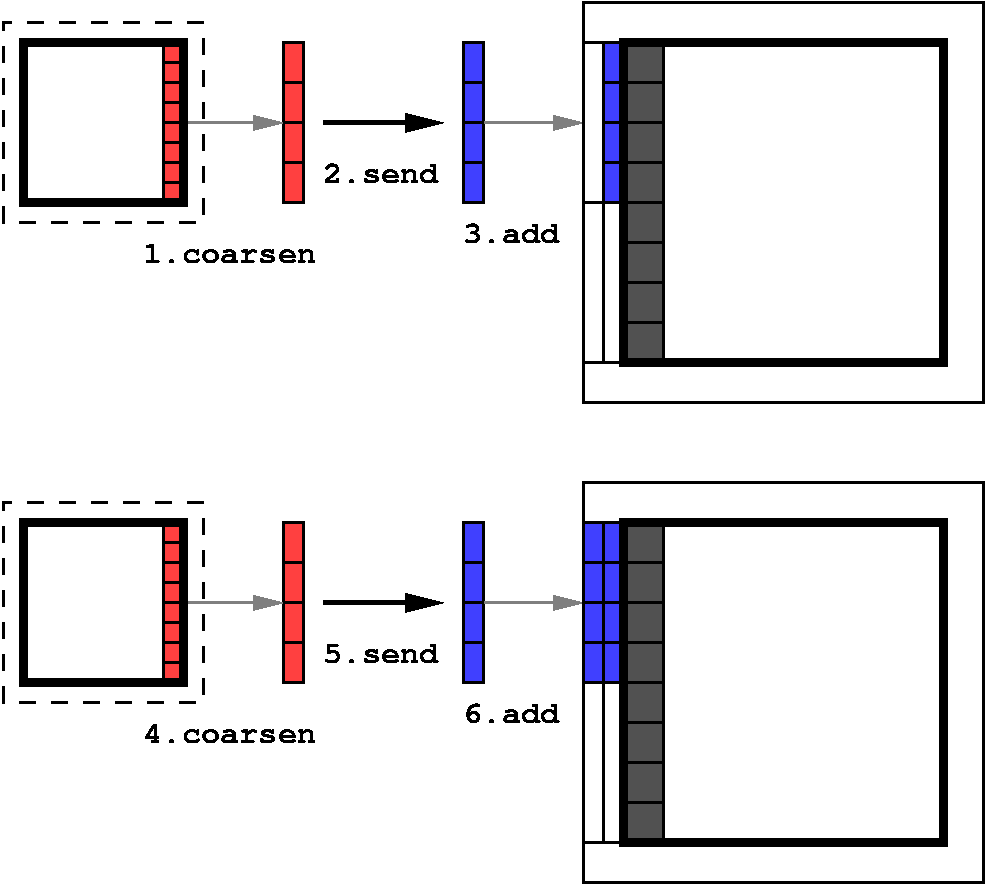
Face fluxes represent an array of fluxes of a given conserved Field through a Block’s face or subset of a face. Operations available for fluxes including coarsening, for summing fluxes in a finer block to match the resolution of a neighboring coarser block, and summing, for accumulating a sequence of fluxes associated with a block with a finer time step to match a neighboring block’s coarser time step.
FaceFluxes::FaceFluxes (Face face, int index_field, int nx, int ny, int nz, int cx, int cy, int cz)Create a FaceFluxes object for the given face, field, and block size. Optionally include centering adjustment (0 <= cx,cy,cz <= 1) for facet-, edge-, or corner-located field values
void FaceFluxes::allocate()Allocate the flux array and initialize values to 0.0.
void FaceFluxes::deallocate()Deallocate the flux array.
void FaceFluxes::clear()Set flux array values to 0.0.
Face FaceFluxes::face()Return the face associated with the FaceFluxes.
int FaceFluxes::index_field()Return the associated field index.
void FaceFluxes::get_size (int * mx, int * my, int * mz)Return the array dimensions of the flux array, including any adjustments for centering. Indexing is ix + mx*(iy +my*iz).
void FaceFluxes::set_flux_array ( std::vector<double> array, int dx, int dy, int dz)Copy flux values from an array to the FluxFaces flux array. Array element array[ix*dx + iy*dy + iz*dz] should correspond to flux value (ix,iy,iz), where (0,0,0) <= (ix,iy,iz) < (mx,my,mz).
std::vector<double> & FaceFluxes::flux_array (int * dx=0, int * dy=0, int * dz=0)Return the array of fluxes and associated strides (dx,dy,dz) such that the (ix,iy,iz) flux value is fluxes[ix*dx + iy*dy + iz*dz], where (0,0,0) <= (ix,iy,iz) < (mx,my,mz).
void FaceFluxes::coarsen(int cx, int cy, int cz, int rank)Used for coarsening fine-level fluxes to match coarse level fluxes. Arguments (cx,cy,cz) specify the child indices of the block within its parent (not to be confused with centering (cx_,cy_,cz_); flux array size is kept the same, with offset determined by child indices.
void FaceFluxes::accumulate (FaceFluxes & ff, int cx, int cy, int cz, rank)Add the FaceFluxes object to this one. Used for accumulating fluxes with finer time steps until they match the coarser time step. Assumes spacially-conforming FaceFluxes objects.
FaceFluxes & FaceFluxes::operator *= (double weight)Scale the fluxes array by a scalar constant.
2.2.1.4. FluxData class
The FluxData class defines a collection of all FluxFaces required by a Block to perform flux corrections. This includes all flux arrays on Faces whose neighboring Block differs in either mesh refinement level or time step. FluxFaces for faces that require flux-correction come in conforming pairs, one set of fluxes corresponding to the Block, and one corresponding to the block’s neighbors. Flux arrays for the neighboring block are received in the flux refresh operation. Support for coarsening, adding, and differencing fluxes is the responsibility of the FaceFluxes class; FluxData is primarily a container.
FluxData::FluxData()Create an empty FluxData() object
void FluxData::allocate(int nx, int ny, int nz, std::vector<int> field_list, std::vector<int> * cx_list=nullptr, std::vector<int> * cy_list=nullptr, std::vector<int> * cz_list=nullptr)Allocate all flux arrays for each field in the list of field indices. Optional arrays to indicate the centering of fields may also be provided.
void FluxData::deallocate()Deallocate all face fluxes for all faces and all fields.
int FluxData::num_fields()Return the number of field indices.
int FluxData::index_field(int i_f)Return the i’th field index.
void FluxData::block_fluxes(int axis, int face, int i_f)Return the face fluxes object associated with the given facet and field. Note 0 <= i_f < num_fields() is an index into the field_list vector, not the field index itself.
void FluxData::neighbor_fluxes(int axis, int face, int i_f)Return the neighboring block’s face fluxes associated with the given facet and field. Note 0 <= i_f < num_fields() is an index into the field_list vector, not the field index itself.
void FluxData::set_block_fluxes(FaceFluxes * ff, int axis, int face, int i_f)Set the block’s face fluxes associated with the given facet and field. Note 0 <= i_f < num_fields() is an index into the field_list vector, not the field index itself.
void FluxData::set_neighbor_fluxes(FaceFluxes * ff, int axis, int face, int i_f)Set the neighboring block’s face fluxes associated with the given facet and field. Note 0 <= i_f < num_fields() is an index into the field_list vector, not the field index itself.
void FluxData::sum_neighbor_fluxes(FaceFluxes * ff, int axis, int face, int i_f)Accumulate (sum) the neighboring block’s face fluxes associated with the given facet and field. Note 0 <= i_f < num_fields() is an index into the field_list vector, not the field index itself.
2.2.2. Flux Communication
Communicating fluxes between adjacent blocks is similar to communicating field face data and migrating particles, so it makes sense to augment the existing refresh mechanism for communicating FieldData and ParticleData to also refresh FluxData. We briefly outline a couple possible differences below.
First, flux data is generally only communicated from coarse blocks to neighboring fine blocks, and from blocks with a smaller time step to neighboring blocks with larger time steps. Thus an additional communication pattern and associated synchronization could be introduced. Examples of existing synchronization patterns are sync_neighbor type for communicating between all pairs of adjacent leaf blocks, and sync_level between all adjacent blocks in the same level. For fluxes, we could introduce a sync_fluxes synchronization type, which by definition includes
leaf blocks only
usually only d-1 faces (may need block edge- or corner-adjacent flux data for MHD)
only from finer resolution to coarser resolution (temporal as well as spacial)
Communicating fluxes assuming constant time steps.
Communicating fluxes assuming adaptive time steps.
2.2.3. Testing
Multiple levels of testing are used, including unit tests for the lower level Face, FaceFluxes, and FluxData classes, and application testing for MethodFluxCorrect.
Application tests include varying difficulties of meshes, physics, boundary conditions, and floating-point precision. Different levels are summarized below:
Mesh
M0 single block
M1 unigrid
M2 one additional refinement level
M3 two additional refinement levels
Physics
PH hydro
PG gravity
PP gravitating particles
PC cosmological expansion
Boundary
BP periodic
BR reflecting
Floating-point precision
F4 single
F8 double
Parallelism
p1: single processor
pc: parallel across cores
pn: parallel across nodes
2.2.4. Documentation
DD-1. Design: add flux correction design to design/design-flux.rst
DD-2. Method: add MethodFluxCorrect method documentation to user/problem_method.rst
DD-3. Testing: add testing/testing_flux.rst test documentation
DD-4. Parameters: update doc/source/param/ parameter documentation
2.3. Milestones
M-1. MethodFluxCorrect demonstrated working for hydrodynamics
M-2. MethodFluxCorrect demonstrated working for MHD
2.4. Tasks
T-1. FaceFluxes class design and implementation
T-2. FluxData class design and implementation
T-3. MethodFluxCorrect class design and implementation